|
I am an undergraduate researcher at Wake Forest University, advised by Dr. Sarra Alqahtani and Dr. Dongwon Lee. I am also pursuing a bachelor's of science in computer science and mathematics, and I am the founder of The Robotics Club at WFU. I have received the Barry Goldwater Scholarship for excellence in undergraduate STEM research, and I was a finalist for the Computing Research Association's Outstanding Undergraduate Researcher award. |
|
|
I'm interested in the robustness and generalization capabilities in reinforcement learning agents. I am working on methods to identify areas of weakness of RL policies, in order to create agents which are certifiably robust. |
|
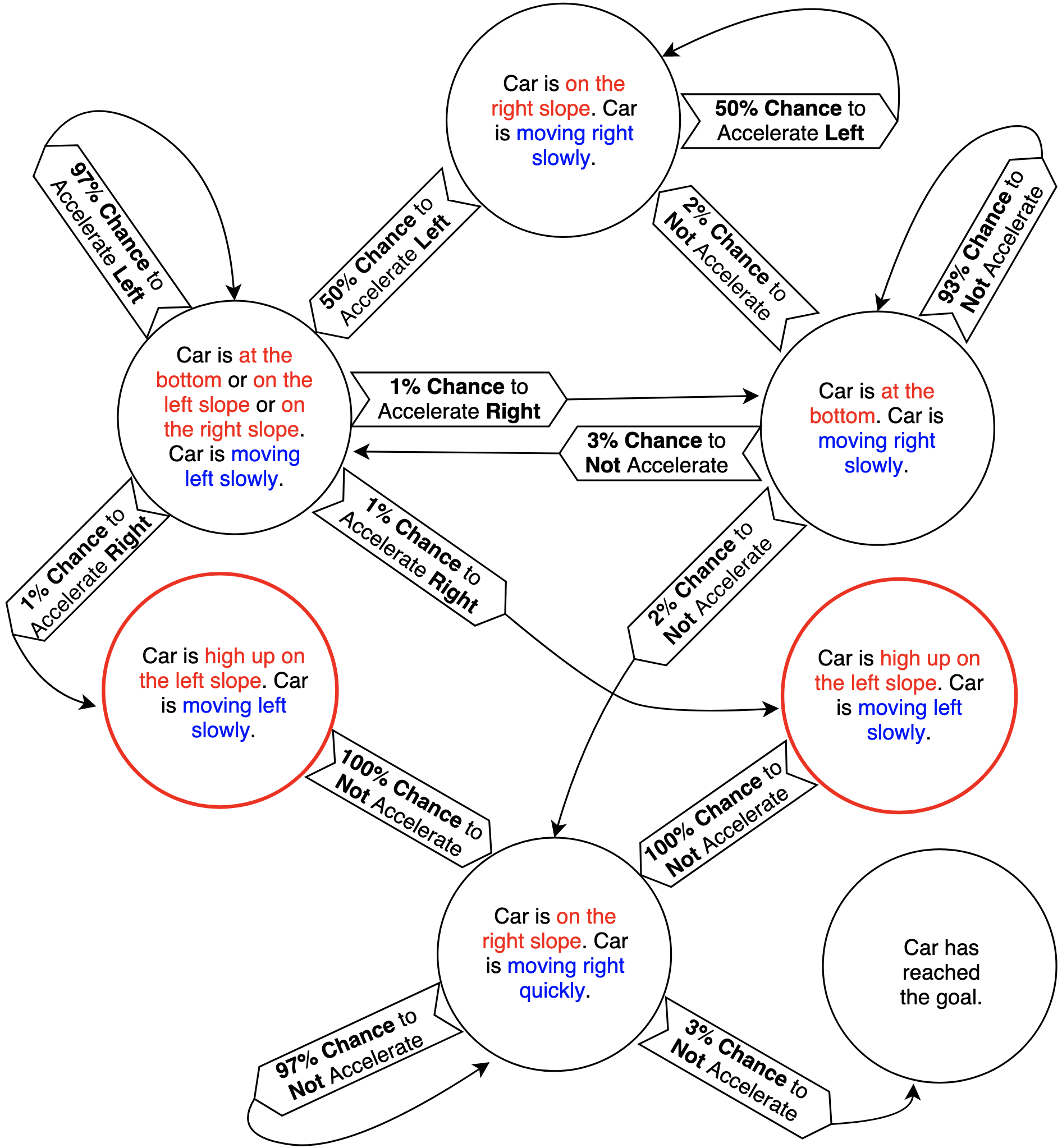
Joe McCalmon, Thai Le, Sarra Alqahtani, Dongwon Lee AAMAS, 2022 We create an algorithm to produce interpretable graphs for explaining the policies of black-box RL agents. Our method allows for end-users with little knowledge of reinforcement learning to understand the behavior of RL agents before deployment. I will present this work at AAMAS 2022. |
|
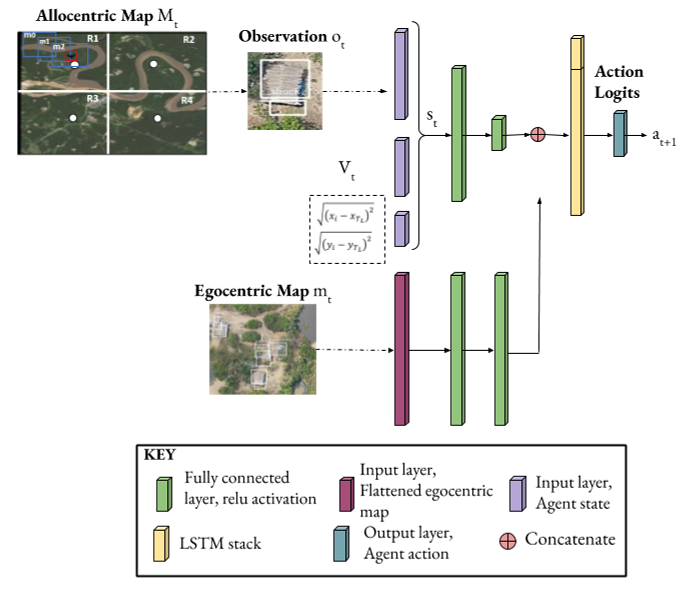
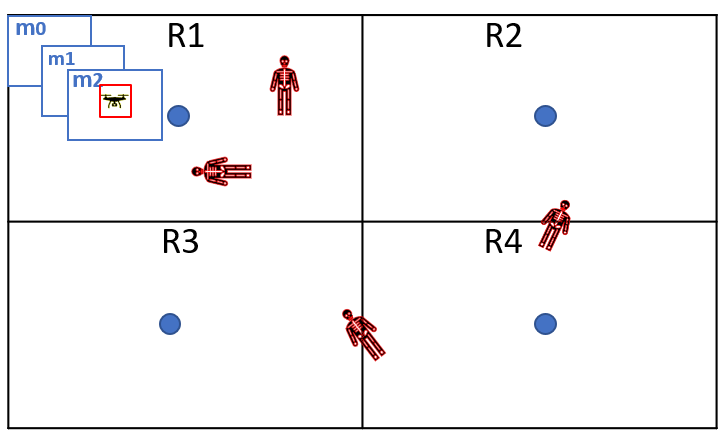
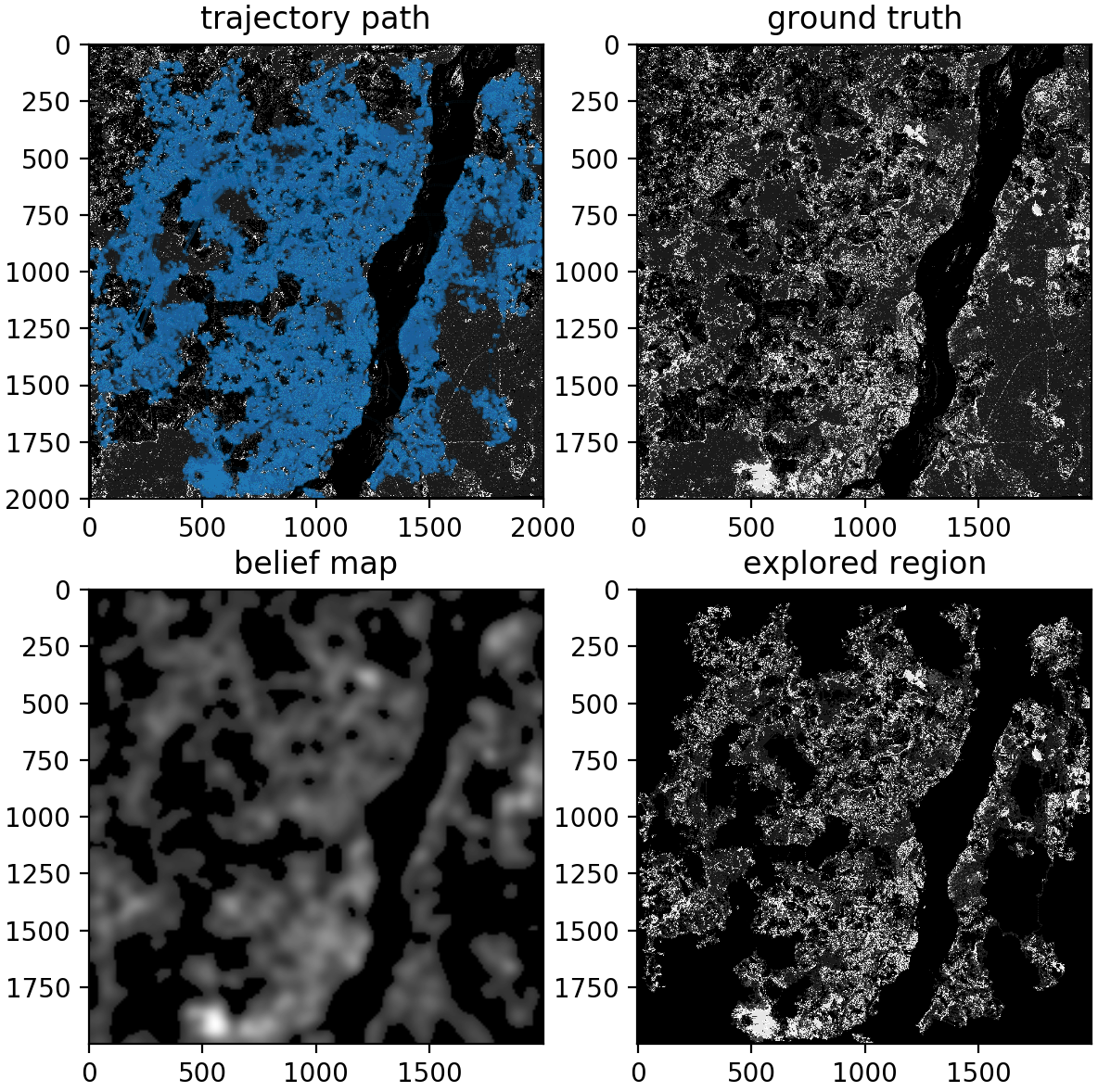
Ashley Peake, Joe McCalmon, Yixin Zhang, Danny Myers, Sarra Alqahtani, Paúl Pauca ICUAS, 2021 We develop a reinforcement learning agent for drone navigation in POMDPs which can zero-shot generalize to unseen environments. We are in the process of applying this work towards the detection of illegal gold mining in the Amazon Rainforest. I presented this work at the AAAI-21 undergraduate consortium. |
|
Joe McCalmon, Ashley Peake, Yixin Zhang, Benjamin Raiford, Sarra Alqahtani IEEE SSRR, 2021 We develop a reinforcement learning agent for search and rescue in POMDPs which can generalize to different target locations. |
|
Yixin Zhang, Joe McCalmon, Ashley Peake, Sarra Alqahtani, Paúl Pauca ICARA, 2021 We employ a probabalistic information gain map to encourage the efficient exploration of drones in large, unknown environments. |
|
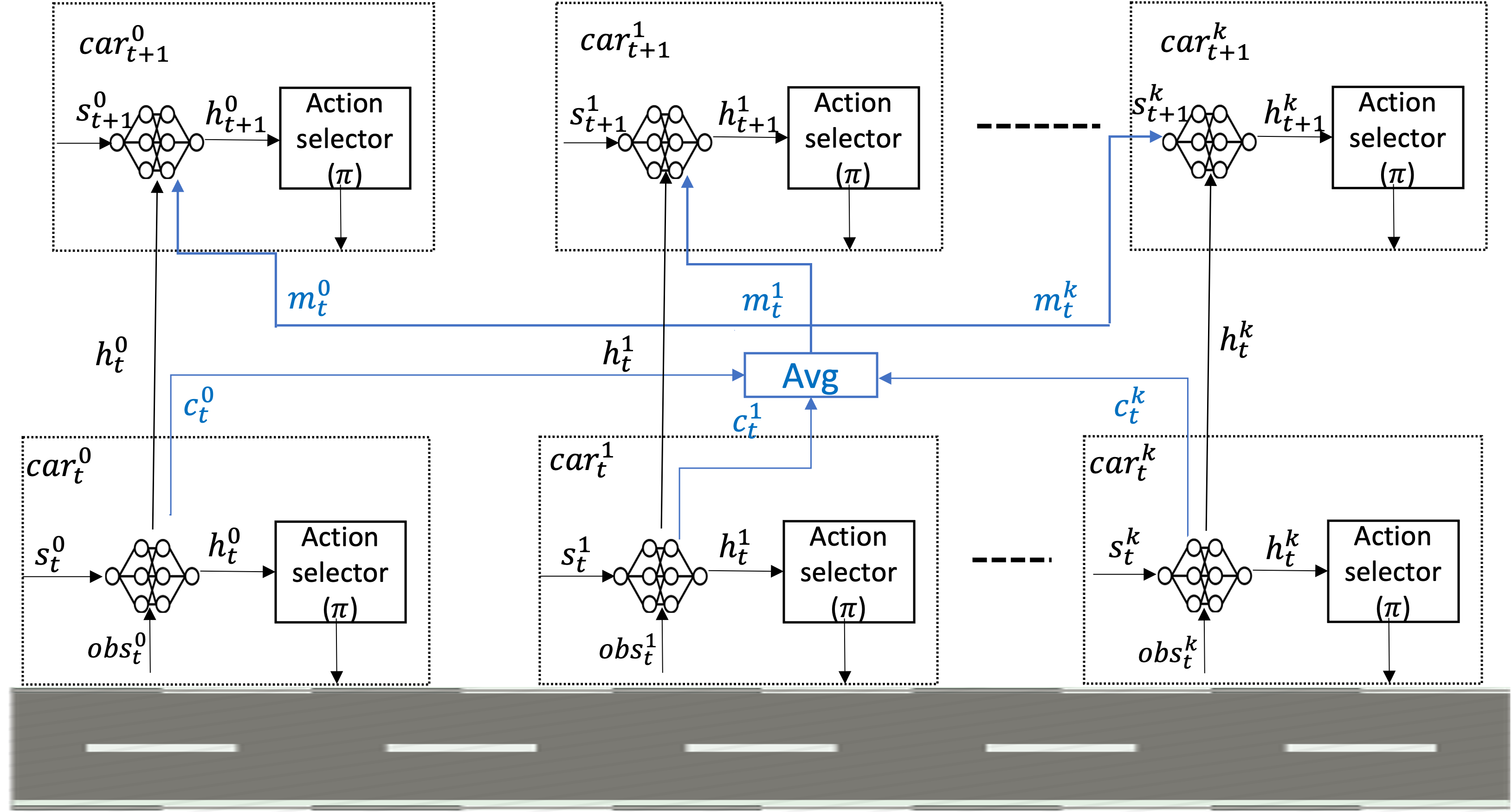
Joe McCalmon, Ashley Peake, Benjamin Raiford, Sarra Alqahtani ICTAI, 2020 We propose a multi-agent reinforcement learning approach for autonomous vehicles which communicate in a platoon formation. |
|
Website source code is adapted from Jon Barron. |